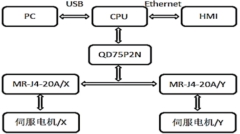
隨著企業(yè)的生產(chǎn)轉(zhuǎn)型、人力成本的不斷提升以及人工生產(chǎn)弊端的不斷涌現(xiàn),人工已不能滿足市場的更高需求,特別是在某些制造精度較高的地方,人工的質(zhì)量幾乎無法滿足生產(chǎn)要求。面對市場上日益激烈的競爭,直角坐標機器人應運而生。直角坐標機器人作為市場應用中最為常見的機械裝置,由于其高精度、高負載、高性價比等優(yōu)點,被廣泛應用于搬運、碼垛、噴涂等工業(yè)生產(chǎn)領(lǐng)域。三菱Q系列PLC及QD75P2N定位模塊組成控制系統(tǒng),配合插補運算進行直角坐標機器人路徑分析,并可在X/Y軸上實現(xiàn)線性運動。
到第 頁
友情鏈接
電話:010-62669087 控制網(wǎng)版權(quán)所有未經(jīng)許可不得轉(zhuǎn)載
地址:北京市海淀區(qū)上地十街輝煌國際5號樓1416室(100085)
版權(quán)所有 控制網(wǎng) 京ICP備14036844-2號 北京市公安局海淀分局備案號:11010802023656號





 名家名篇
名家名篇 北京市公安局海淀分局備案號:11010802023656號
北京市公安局海淀分局備案號:11010802023656號

 官方微信
官方微信